

发布时间:2017-04-06 09:46:20
来源:赛迪-中国软件评测中心
作者:韩敏
【CMIC讯】坐标系是为确定机器人的位置和姿态而在机器人或空间上进行定义的位置指标系统。工业机器人的坐标系根据不用用途,有多种分类,理解和掌握各个坐标系的意义及使用方法,合理运用这些坐标系,可以给操作和编程带来极大的方便,对于工业机器人的研究和实操具有重要意义。
工业机器人一般使用多种坐标系,每种坐标系都适用于特定类型的微动控制或编程,坐标系可以在机器人示教器中进行设置,工业机器人一般有以下常用坐标系:
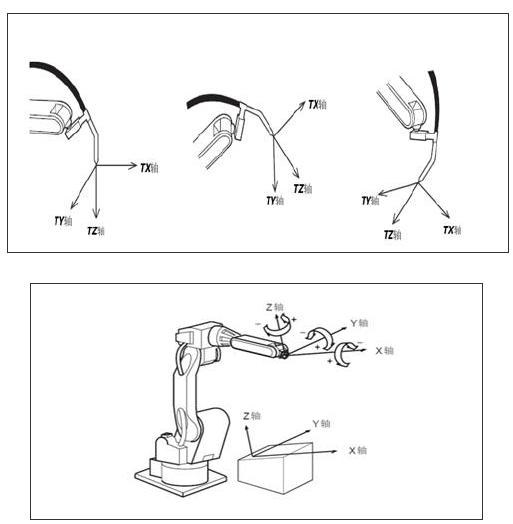
1)基坐标系:基坐标系是设置在机器人基座中的坐标系,坐标原点一般为基座中心点。可以通过在基座标X轴、Y轴、Z轴上的位移和旋转角来确定机器人末端法兰或抓手的位置和姿态。如下图所示,基座标系遵循右手法则,它是其他坐标系的基础。
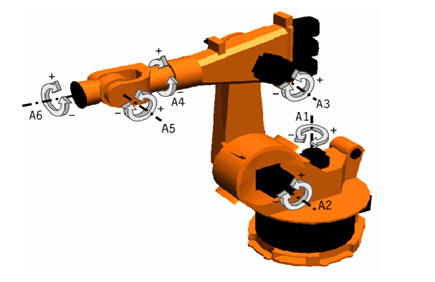
2)关节坐标系:关节坐标系是设定在机器人关节中的坐标系。关节坐标系中机器人的位置和姿态,以各关节底座侧的关节坐标系为基准而确定。设定关节坐标系时,机器人的各轴分别运动,关节坐标系下各轴运动方向如下图所示。
3)工具坐标系:即安装在机器人末端的工具座标系,原点及方向都是随着末端位置与角度不断变化的,该座标系实际是将基础座标系通过旋转及位移变化而来的。如下图所示,设定为工具坐标系时,机器人控制点沿设定在工具尖端点的X、Y、Z 轴做平行移动。工具坐标的移动,以工具的有效方向为基准,与机器人的位置、姿势无关,所以进行相对于工件不改变工具姿势的平行移动操作时最为适宜。
4)用户坐标系:即用户自定义坐标系, 是用户对每个作业空间进行定义的直角坐标系,该坐标系实际是通过基座标系将轴向偏转角度变化而来。在用户坐标系中,以用户坐标的X、Y、Z轴为基准进行回转。用户坐标系可用于表示固定装置、工作台等设备。
责任编辑:拂晓晨风

